

The two biomechanics professors at the University of Twente are focusing on developing an interface between the body and prosthesis, for direct control by the patient. ‘We want to develop a prosthesis that is really an extension of the body.’ The project also involves prosthesis manufacturer Ottobock.
‘This prosthesis is so much better than my old one!’, says patient Gerard Mast enthusiastically. ‘Especially when I walk a stairs or sloping terrain, it’s a huge improvement and comes much closer to walking with my natural leg’. Mast lost his lower leg about a year ago and is now participating in UT Twente’s research to develop an improved prosthesis that can be brain-controlled by the patient. Around his leg, a device full of electronics is attached, with many wires sticking out. ‘This interface electronically connects electrodes on the skin with the prosthesis. The electrodes pick up the muscle activity in the remaining leg and translates this into movement of the motorized prosthesis’, Herman van der Kooij, Professor at the Department of Biomechanical Engineering, explains. This allows Mast to directly control its movements and this results in more natural and controlled walking.
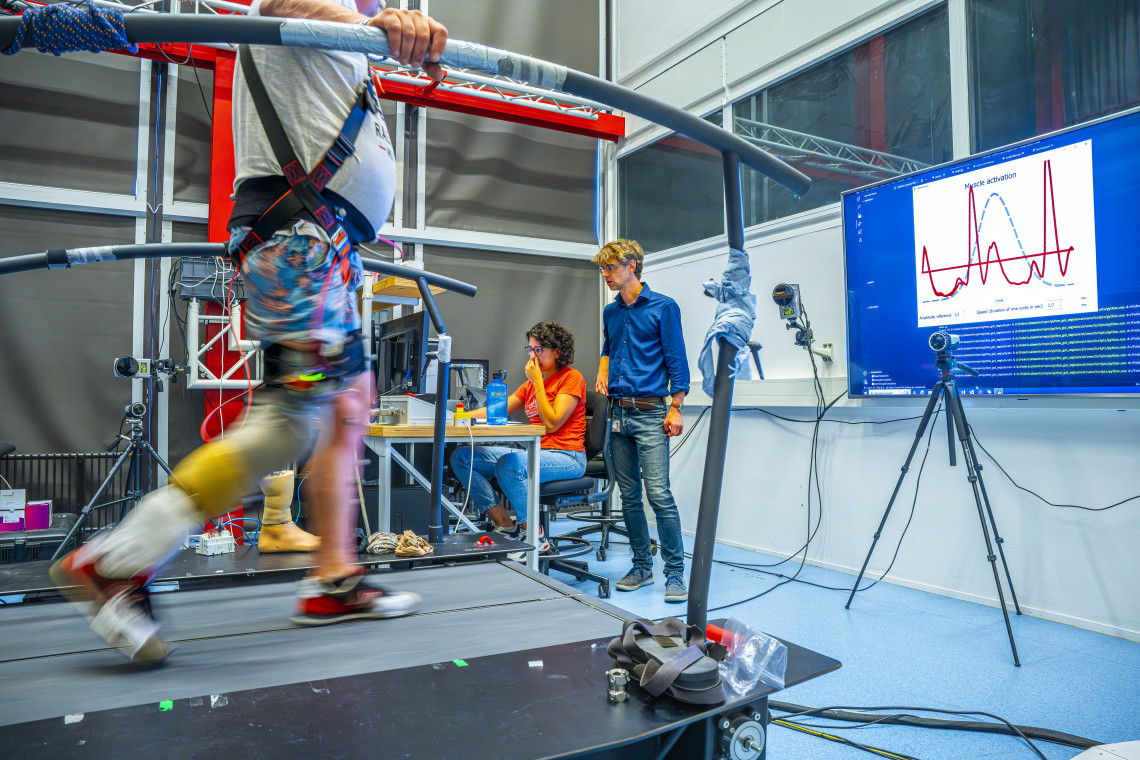
Walking experiment
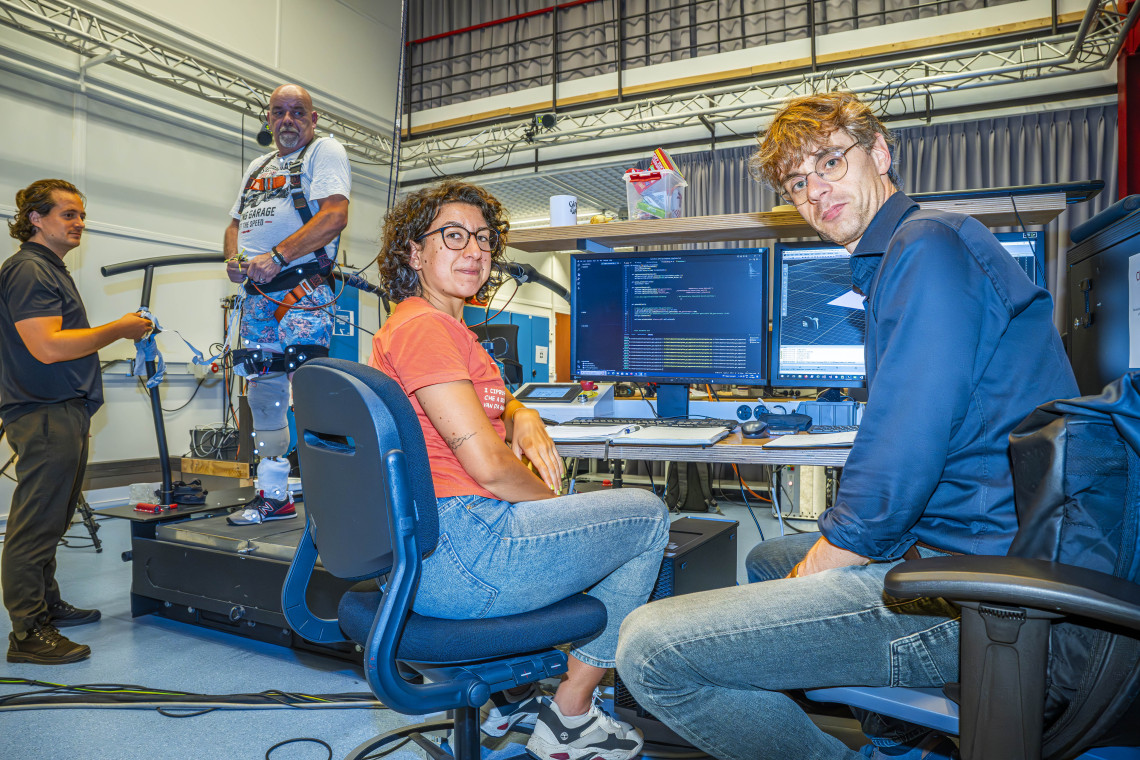
During the walking experiment, Mast is attached to a harness for safety, while several camera’s monitor his movements on a treadmill. Scientists measure the muscle activity in his stump, that appear as peaks on a large screen. One of the aims of the test is that the patient learns how to control the remaining muscles in his leg to move the prosthesis in an optimal way. Mast experiences the walking with the new prosthesis on the treadmill as comfortable, but more fine tuning is needed for an optimal control.
Much more control
‘Current leg prosthesis are mechanical devices that are connected to the stump, sometimes equipped with springs that compress and release to improve walking’, says Professor Massimo Sartori, colleague of Herman van der Kooij at the same department. ‘They usually work well on easy, flat terrain. But on a slope, or if the patient trips on a stone, they don’t respond as well, since reflexes to maintain and restore balance are of course absent.’
To overcome these drawbacks, the team is developing a completely new type of prosthesis that allows much more control, including reflexes to maintain balance. Van der Kooij, also project co-PI of Simbionics, explains: ‘We aim to develop a prosthesis that truly is an extension of the body. Electrical signals, which are generated when the remaining muscles in the stump contract, operate the prosthesis. These muscle contractions are controlled by the brain. Our final goal is a prothesis that can be fully controlled by the patient.’
More natural walking
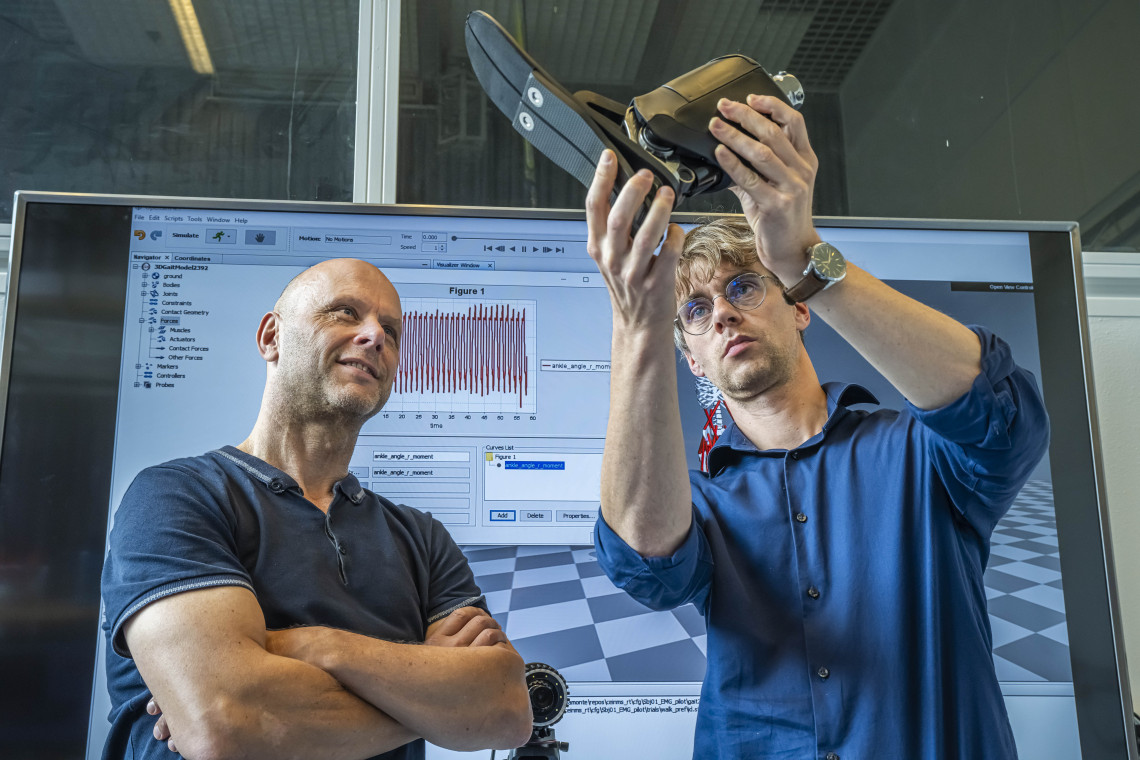
As a basis of their new bionic prosthesis, the scientists use the existing ankle prosthesis developed by climber and MIT biomechatronics professor and mountaineer Hugh Herr as a starting point. Herr lost both his under legs due to frostbite during a climbing expedition. After this unfortunate event, he focused on science and biomechanics and specialized in prosthesis. Eventually he developed a state of the art, autonomously operating prosthesis, equipped with a motor and a microprocessor. The microprocessor communicates with the build-in motor and senses and controls the joint position, as well as the forces applied.
In 2016, Herr received a honorary doctorate from the UT. Herr’s prosthesis design results in improved and more natural walking over different types of terrain. It mimics the movement of a real leg and can even be used to climb. However, despite the huge improvement to existing prosthesis, it couldn’t be controlled by the patient. Also, quick reflexes, to avoid tripping and falling, were not possible, making walking over more difficult and unpredictable terrain still a bit hazardous.
Multidisciplinary collaboration
To build a bionic leg that can be operated as if it is the patient’s own, requires new technologies, dedication and multidisciplinary collaboration, where biomechanics, physiology, anatomy, and technology come together. The team decided to modify Herr’s motorized prosthesis by including an interface, which picks up electrical signals from contraction of the remaining stump muscles, and transfer these to the motor. This should allow for an optimal control of the motorized prosthesis and improve walking.
To achieve this complex task, the team first built a simplified digital model of the lost limb in the computer, including all muscles, tendons and joints. Sartori: ‘If you know how the muscles and tendons run, you can calculate how the forces they exert are conveyed to the joints.’ Then, this digital limb, running on a computer microprocessor is electronically connected to the muscles in the stump and to the motors in the prosthesis.
Natural movement
The scientists subsequently analyzed how the electrical signals from muscles in the remaining stump activate the digital limb. When the patient activates these remaining muscles, within a fraction of a second, a microprocessor calculates the different muscle forces from the digital limb on the virtual joints. This information is then swiftly send to the prosthesis to set it in motion and initiate a natural movement. The whole cascade of events is controlled by the patient, and starts with the brain activating the remaining muscles and ends with an activated prothesis.
More improvements
To make this work in practice, this virtual limb is connected to the muscles and the prosthesis by an advanced interface. ‘We focus on developing an interface that transfers signals from the body to the virtual limb and subsequently to the prosthesis’, Sartori says. ‘To make sure that also reflexes can be mimicked, in the future we will equip the prothesis also with artificial intelligence, so it can respond very quickly if the patient trips or loses balance.’ But the future may hold more improvements. Currently, the interface is connected to the skin to pick up electrical signals from the muscles. To minimize the discomfort for patients, the scientists consider to incorporate the interface electrodes inside the muscles, making it less bulky and easier to use.
More complicated prosthesis
Although, huge progress has been made in the development of an efficient bionic leg, there is still a lot of research to be done to perfect the technology. Currently, the team is developing a method where the prosthesis informs the patient about, for example the position of the foot and how much force has to be applied, by using vibrations on the skin. The patient can learn to interpret this feed-back, and can quickly make the corrections needed.
‘I am very happy that we have an approved extension of the project for two years to further develop this technology’, van der Kooij says. ‘And this design allows for a modular assembly, since the same principles apply for different joints. Therefore, we are eventually able to develop a more complicated prosthesis, where both the knee and ankle are combined.’
For amputee patient Gerard Mast, a tiring afternoon, full of tests is almost over. But his efforts are for a good cause: while the prosthesis continues to improve, it will only be a matter of time before he can use the new prothesis in his daily life and walk almost as good as before.




